- نبيل نور الدين يتعرض لحادث سير وينقل للمستشفى
- فيديو.. جرحى إثر سقوط صاروخ إيراني على منازل وسط إسرائيل
- المحكمة في حكمها ببراءة المتهم بالتحرش بفتاة الأتوبيس: الأحكام تبنى على اليقين لا الشك
- هل يطبق قرار الغلق 9 مساء على مترو الأنفاق؟
- الرئيس الإيراني: نقدر مساعي وجهود بعض الدول الصديقة والجارة لوقف الحرب
- رئيس الحكومة يطمئن المواطنين: الزيادة المرتقبة في الأجور ستكون كبيرة
- مدبولي: زيادات الأجور المقبلة كبيرة وتتجاوز التضخم لأول مرة
- 5 دول خليجية تتعرض لاعتداءات إيرانية جديدة السبت
- إيران في "ظلام رقمي" مع استمرار انقطاع الإنترنت منذ أسابيع
- رئيس إيران يوجه رسالة إلى دول المنطقة.. ماذا قال؟
- قرارات حكومية جديدة لترشيد الوقود بينها العمل عن بعد
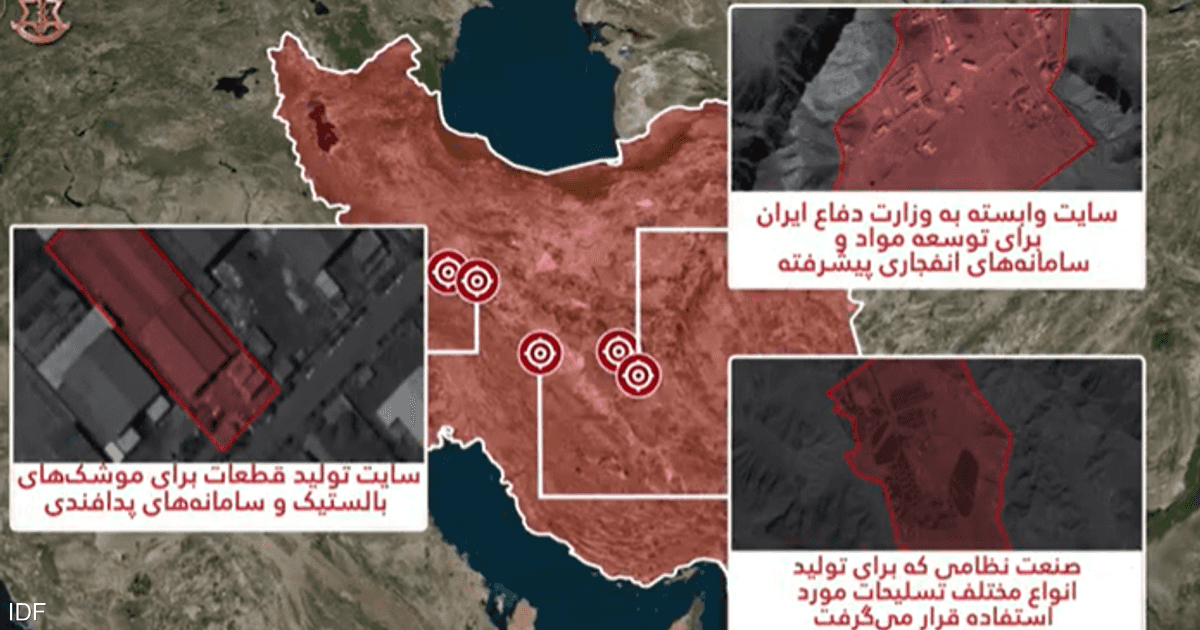
- الجيش الإسرائيلي: 50 مقاتلة تضرب منشآت عسكرية ونووية بإيران
- إسرائيل تضرب بنى تحتية وإيران ترد بالصواريخ
- هل تعرض عبدالحليم حافظ لـ تهديد بالاغتيال من الموساد الإسرائيلي؟
- مدبولي للإعلام: انقلوا للمواطن ما يحدث عالميا.. في دول اتخذت إجراءات أصعب من مصر
- مدبولي: الزيادة بأسعار الوقود خفضت 1.2 مليار دولار من قيمة الاستهلاك السنوية
- رئيس الوزراء: لدينا مخزون آمن يتراوح بين 6 أشهر وسنة لكل السلع
- وزير الكهرباء للمواطنين: لم نرفع الأسعار منذ عامين.. وساعدونا في ترشيد الاستهلاك
بلا عقل أو برمجيات.. روبوتات مجهرية تحاكي حركة الكائنات الحية

طور باحثون في جامعة لايدن بهولندا روبوتات مجهرية قادرة على الحركة والتنقل والتكيف دون الحاجة إلى دماغ أو أجهزة استشعار أو برمجيات، بل يعتمد سلوكها كليًا على بنيتها الفيزيائية وتفاعلها مع البيئة المحيطة.
يبلغ طول هذه الروبوتات عدة عشرات من الميكرومترات فقط، أي أصغر بكثير من عرض شعرة الإنسان. وعلى الرغم من صغر حجمها، فإنها تستطيع السباحة والاستجابة للعقبات بطرق تحاكي الكائنات الحية.
وقام الفريق، بقيادة البروفيسورة دانييلا كرافت والباحث منغشي وي، ببناء الروبوتات على شكل سلاسل مرنة من أجزاء متصلة. وعند تعرضها لحقل كهربائي، تبدأ هذه الهياكل في التحرك من تلقاء نفسها، بحسب تقرير لموقع "إنترستينغ إنجنيرينغ" المتخصص في أخبار الابتكارات والهندسة، اطلعت عليه "العربية Business".
بدلًا من الاعتماد على الإلكترونيات، تستخدم هذه الروبوتات شكلها ومرونتها لتوليد الحركة والتكيف مع محيطها في الوقت الفعلي.
يعتمد هذا المفهوم على طريقة تحرك الحيوانات؛ فالديدان والثعابين تغير شكل أجسامها باستمرار للتحرك عبر مساحات ضيقة ومعقدة.
وقال كرافت: "الحيوانات مثل الديدان والثعابين تكيف شكلها باستمرار أثناء الحركة، مما يساعدها على التنقل في بيئاتها. والروبوتات الكبيرة تستخدم المرونة بشكل مشابه لأداء وظائفها. ومع ذلك، حتى الآن، كانت الروبوتات الدقيقة إما صغيرة وصلبة، أو كبيرة ومرنة. تساءلنا عما إذا كنا نستطيع الوصول إلى روبوتات دقيقة صغيرة ومرنة في مختبرنا".
ولصناعة هذه الروبوتات، استخدم الفريق طابعة ثلاثية الأبعاد دقيقة للغاية. ويبلغ حجم كل عنصر حوالي 5 ميكرومترات، ويرتبط بالعناصر الأخرى عبر مفاصل صغيرة تصل إلى 0.5 ميكرومتر.
تُبنى هذه الهياكل على شكل سلاسل من العناصر ذاتية الدفع التي تولد الحركة بشكل جماعي. وبمجرد تفعيلها، تتحرك الروبوتات بسرعة تصل إلى 7 ميكرومترات في الثانية.
تعتمد عملية التصنيع على أنظمة طباعة دقيقة متطورة قادرة على العمل ضمن حدود التصنيع الحالية، مما يُتيح المرونة والدقة الهيكلية على نطاقات متناهية الصغر.
وعند تفعيلها، تتحرك الروبوتات بحركة شبيهة بالموجة. ويسمح تصميمها المرن لها بالانحناء والدفع للأمام دون تعليمات مبرمجة.
ووجد الباحثون أن حركة الروبوتات وشكلها يؤثران على بعضهما البعض باستمرار. ويتيح هذا التغذية الراجعة لها التكيف تلقائيًا عند تغير الظروف.
تستطيع الروبوتات تجنب العوائق وتغيير اتجاهها دون أي نظام تحكم. ويمكنها أيضًا التحرك عبر البيئات المزدحمة ودفع الأشياء من طريقها.
وقال وي: "عندما يتباطأ الروبوت أو حتى يتوقف، يبدأ في تحريك ذيله كما لو كان يريد التحرر".
ويشير الباحثون إلى أن هذه التقنية قد تدعم تطبيقات مثل توصيل الأدوية بشكل مستهدف والإجراءات الجراحية قليلة التوغل. والخطوة التالية هي فهم أفضل لكيفية ظهور هذا السلوك من تفاعلات فيزيائية بسيطة.
 المصدر:
العربيّة
المصدر:
العربيّة